Uvod v robote
Robot je stroj, ki je videti kot človek. To je bilo programirano za nekaj. Beseda Robot izvira iz slovanske besede robota (kar pomeni prisilni delavec). Robot je bil razvit v šestdesetih letih 20. Roboti so izdelani iz kovin in mešalnika drugih elementov. Roboti samo ukazujejo in kaj ljudje govorijo. Pred tridesetimi leti so bili roboti nekaj v znanstvenofantastičnem filmu. Toda danes se robotika uporablja na mnogih področjih. In zelo pomembno je za prihodnost človeštva. The robotske tehnologije izboljšujejo pomoč nacionalni obrambi, zdravstvu, proizvodnji, domovinski varnosti, izobraževanju, potrošniškem blagu in številnim različnim sektorjem. Zdravniki že uporabljajo robotiko v posebnih ordinacijah. Roboti so pomembni, ker opravlja naloge, ki so za človeka tudi nevarne in nemogoče.
5 razlogov, zakaj so bili roboti priljubljeni
- Hitrost
- Nevarna okolja
- Ponavljajoče se naloge
- Učinkovitost
- Natančnost
Hitrost:
Roboti se lahko uporabljajo, ker so pri opravljanju nalog hitrejši od ljudi. Robot je res mehanizem, ki ga nadzoruje računalnik. Vemo, da lahko računalniki izračunajo in obdelajo podatke zelo hitro v primerjavi s človeškimi bitji. Nekateri roboti se dejansko premikajo hitreje in opravijo nalogo, na primer dviganje in vstavljanje predmetov, hitreje kot človeški.
Nevarna okolja:
Robote lahko uporabljamo v nevarnem okolju, ker lahko delajo tam, kjer bi bil človek v nevarnosti. Na primer, robot je lahko zasnovan tako, da zdrži večjo količino toplote, sevanja in kemičnih hlapov kot ljudje.
Ponavljajoče se naloge:
Včasih roboti v resnici niso veliko hitrejši od ljudi, so pa sposobni preprosto opravljati isto delo znova in znova. Za robota je to enostavno, kajti ko je robot enkrat programiran, da opravi delo, se lahko isti program večkrat zažene, da opravilo opravi večkrat. In robotu ne bo dolgčas kot človeku.
Učinkovitost:
Učinkovitost je predvsem izvajanje nalog brez odpadkov. To pomeni
- Ne izgubljam časa
- Ne zapravljajte materialov
- Ne zapravljamo energije
Natančnost:
Natančnost je zelo natančno izvajanje nalog. V tovarniških izdelkih je treba vsak izdelek izdelati enako. Ko se predmeti sestavljajo, lahko robot postavi dele v delce milimetra.
Nadzor robota
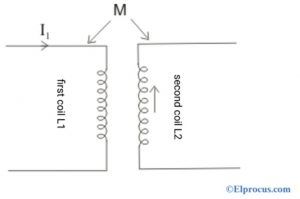
Osnovni robot ali robotski sistem je sestavljen iz togega telesa, v katerem je celotno vezje robota. Vezje je sestavljeno iz senzorjev, ki zaznavajo kakršne koli spremembe v okolju in te podatke pošiljajo v krmilno enoto.
Na podlagi vhodnih podatkov senzorjev krmilna enota ustrezno krmili pogone. Tako je glavno delovanje robota na krmilni enoti. V nekaterih aplikacijah je Robot popolnoma samodejen, tj. Krmiljenje je znotraj same naprave in na podlagi neke senzorske enote krmilna enota samodejno krmili pogone. V nekaterih aplikacijah robota krmilimo ročno.
Oglejmo si dva načina ročnega upravljanja robota
- Uporaba mobilnega telefona
- Uporaba daljinskega upravljalnika za televizor
Robotsko vozilo, nadzorovano z mobilnim telefonom:
Ko govorimo o brezžična robotska vozila , na splošno razmišljamo o vezjih RF tehnologije. Toda ta projekt je zelo drugačen. Za nadzor gibanja robotskega vozila uporablja mobilni telefon. Tu smo uporabili tehnologijo DTMF za nadzor robotskega vozila z uporabo mobilnega telefona. Uporabili smo dva mobilna telefona, eden je povezan z robotom, drugi pa uporabniški telefon. Med tema dvema mobilnikoma se vzpostavi komunikacija in če pritisnete katero koli tipko, se ta ton zasliši na drug konec celice. Ta ton se imenuje 'dvotonski večfrekvenčni' ton (DTMF).

Robotsko vozilo, ki ga nadzira mobilni telefon

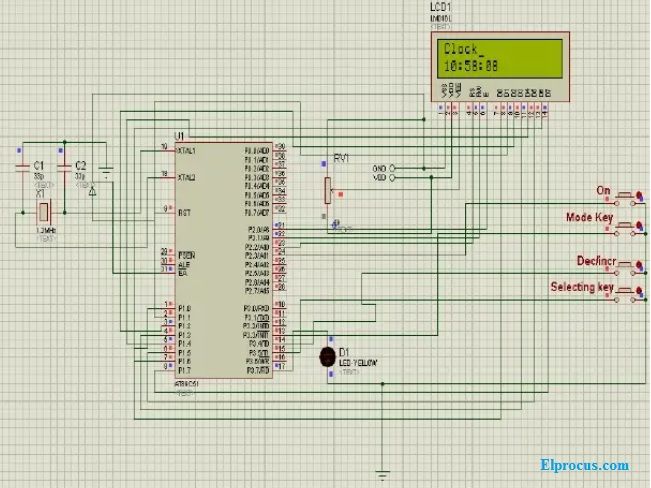
Diagram robotskega vozila pod nadzorom mobilnega telefona
Ta projekt je zasnovan za razvoj robotsko vozilo ki ga nadzoruje mobilni telefon. Ta temelji na mikrokrmilniku 8051. Dva mobilna telefona nadzorujeta robota na zahtevo. En mobilni telefon je povezan z robotom, drugi pa uporabniška celica. Ko tipka, pritisnjena na uporabniškem mobilnem telefonu, ustvari ustrezen ton, jo prejmete v drugi celici. Prejeti ton obdela mikrokrmilnik s pomočjo DTMF dekoderja. Dekoder dekodira ton DTMF v binarne številke in ti binarno kodirani podatki se pošljejo v mikrokrmilnik. Na podlagi vhoda iz mobilnega telefona mikrokrmilnik ustrezno daje gonilniku motorja ustrezne signale, da vsak motor zavrti v želeni smeri. Na primer, ko pritisnete določeno številko na uporabniškem mobilnem telefonu, se klic samodejno pokliče na sistemski mobilni telefon. Sistemski mobilni telefon je povezan z DTMF dekodirnikom, ki ustrezno dekodira ton in motor se zavrti v smeri, ki ustreza pritisnjeni številki.
Robotsko vozilo z IR nadzorom:
V tem sistemu v glavnem robotsko vozilo nadzoruje daljinski upravljalnik televizorja. Infrardeči (IR) senzor je povezan s krmilno enoto robota za zaznavanje oddaljenega signala. Te informacije se posredujejo nadzorni enoti, ki premakne robota v skladu z zahtevo. Mikrokrmilnik se uporablja kot nadzorni sistem.
V tem IR daljinskem upravljalniku gre kot oddajnik. Točka, ko na daljinskem upravljalniku pritisnete gumb, bo IR sprejemnik sprejel signal. Ta znak se pošlje mikrokrmilniku, ki dekodira signal in izvede pripadajoče gibanje po gumbu, pritisnjenem na daljinskem upravljalniku. Če na primer v daljinskem upravljalniku pritisnete številko 1, bo robot obrnjen levo v skladu z našo zahtevo. Preizkus drugih podjetij (naprej, nazaj in desno) se bo izvedel na primerjalni način z uporabo IR. Na sprejemnem koncu razvoj dosežeta dva motorja, ki sta povezana z mikrokrmilnikom.
Program je napisan, tj. Med izvajanjem pošlje ukaze v gonilnik motorja IC v skladu z njegovo zahtevo za zagon motorja za gibanje robota, kot je razloženo zgoraj.

Diagram blokovskega vozila pod nadzorom IR
Če imate kakršen koli dvom glede tega članka, pustite komentar. In mi sporočite več aplikacij in metod, povezanih s tem?