V obdobju 18thstoletja, je prišlo do razvoja enosmernih motorjev. Razvoj enosmernih motorjev se je močno okrepil in se znatno uporabljajo v več panogah. V zgodnjem obdobju 1800-ih in z izboljšavami v letu 1832 je enosmerne motorje sprva razvil britanski raziskovalec Sturgeon. Izumil je prvotni komutatorski tip enosmernega motorja, kjer lahko simulira tudi stroje. Lahko pa se vprašamo, kakšna je funkcionalnost enosmernega motorja in zakaj je pomembno vedeti o uravnavanju hitrosti enosmernega motorja. Ta članek torej jasno razlaga njegovo delovanje in različne tehnike nadzora hitrosti.
Kaj je enosmerni motor?
Enosmerni motor deluje z enosmernim tokom, kjer prejeto električno energijo pretvori v mehansko. To sproži rotacijsko spremembo v sami napravi in tako daje moč za upravljanje različnih aplikacij na več domenah.
Nadzor hitrosti enosmernega motorja je ena najbolj uporabnih lastnosti motorja. Z uravnavanjem hitrosti motorja lahko hitrost motorja spreminjate glede na zahteve in dosežete zahtevano delovanje.
Mehanizem za nadzor hitrosti je uporaben v mnogih primerih, kot je nadzor gibanja robotskih vozil, premikanje motorjev v papirnicah in gibanje motorjev v dvigalih, kjer različne vrste enosmernih motorjev so uporabljeni.
Načelo delovanja DC motorja
Preprost enosmerni motor deluje po principu, da ko je vodnik, ki nosi tok, v a magnetni zvesti d, ima mehansko silo. V praktičnem enosmernem motorju je armatura prevodnik, ki nosi tok, polje pa zagotavlja magnetno polje.
Ko se prevodnik (armatura) napaja s tokom, ustvari lasten magnetni tok. Magnetni tok se bodisi sešteva k magnetnemu toku zaradi navitja polja v eno smer bodisi prekine magnetni tok zaradi navitij polja. Akumulacija magnetnega pretoka v eni smeri v primerjavi z drugo deluje na prevodnik, zato se začne vrteti.
Po Faradayevem zakonu elektromagnetne indukcije vrtilno delovanje vodnika povzroči EMF . Ta EMP v skladu z Lenzovim zakonom ponavadi nasprotuje vzroku, to je dovedeni napetosti. Tako ima enosmerni motor prav posebno značilnost prilagajanja navora v primeru različnih obremenitev zaradi zadnjega EMF.
Zakaj je nadzor hitrosti enosmernega motorja pomemben?
Nadzor hitrosti v stroju kaže vpliv na hitrost vrtenja motorja, kjer to neposredno vpliva na funkcionalnost stroja in je tako pomembno za zmogljivost in rezultat delovanja. V času vrtanja ima vsaka vrsta materiala svojo hitrost vrtenja in se spreminja tudi glede na velikost svedra.
V scenariju črpalnih naprav se bo spremenila hitrost pretoka, zato mora biti tekoči trak sinhroniziran s funkcionalno hitrostjo naprave. Ti dejavniki so neposredno ali posredno odvisni od hitrosti motorja. Zaradi tega je treba upoštevati hitrost enosmernega motorja in upoštevati različne načine nadzora hitrosti.
Nadzor hitrosti enosmernega motorja izvaja ročno delavec ali s pomočjo katerega koli orodja za samodejno krmiljenje. Zdi se, da je to v nasprotju z omejitvijo hitrosti, kjer mora obstajati regulacija hitrosti, ki nasprotuje naravni spremembi hitrosti zaradi spremembe obremenitve gredi.
Načelo nadzora hitrosti
Iz zgornje slike je enačba napetosti preprosta Enosmerni motor je
V = Eb + IaRa
V je napajana napetost, Eb je zadnji EMF, Ia je tok armature in Ra je upor armature.
To že vemo
Eb = (PøNZ) / 60A.
P - število polov,
A - konstanta
Z - število vodnikov
N- hitrost motorja
Z nadomestitvijo vrednosti Eb v napetostni enačbi dobimo
V = (PøNZ) / 60A) + IaRa
Ali pa V - IaRa = (PøNZ) / 60A
tj. N = (PZ / 60A) (V - IaRa) / ø
Zgornjo enačbo lahko zapišemo tudi kot:
N = K (V - IaRa) / ø, K je konstanta
To pomeni tri stvari:
- Hitrost motorja je neposredno sorazmerna z napajalno napetostjo.
- Hitrost motorja je obratno sorazmerna padcu napetosti armature.
- Hitrost motorja je zaradi terenskih ugotovitev obratno sorazmerna s tokom
Tako lahko hitrost enosmernega motorja nadzorujemo na tri načine:
- S spreminjanjem napajalne napetosti
- S spreminjanjem pretoka in spreminjanjem toka skozi navitje polja
- S spreminjanjem napetosti armature in s spreminjanjem upora armature
Več tehnik nadzora hitrosti enosmernega motorja
Ker obstajata dve vrsti enosmernih motorjev, bomo tukaj jasno razpravljali o metodah nadzora hitrosti obeh enosmernih in ranžirni motorji.
Regulacija hitrosti enosmernega motorja v serijskih tipih
Razdelimo ga lahko na dve vrsti, in sicer:
- Tehnika nadzora armature
- Terensko nadzorovana tehnika
Nadzorovana tehnika armature je nadalje razvrščena v tri vrste
- Upor pod nadzorom armature
- Krmiljenje armaturne armature
- Napetost priključne armature
Upor nadzorovan z armaturo
Ta tehnika se najpogosteje uporablja tam, kjer je regulacijski upor zaporedno povezan z napajanjem motorja. Spodnja slika to pojasnjuje.

Nadzor odpornosti armature
Izgube moči, ki se zgodijo pri krmilnem uporu motorja DC, je mogoče prezreti, ker se ta regulacijska tehnika večinoma uporablja dalj časa, da se zmanjša hitrost v času lahkih scenarijev obremenitve. Je stroškovno učinkovita tehnika za vztrajen navor in se v glavnem uporablja pri vožnji z žerjavi, vlaki in drugimi vozili.
Krmiljenje armature
Tu bo reostat v obeh zaporednih in ranžirnih povezavah z armaturo. Prišlo bo do spremembe napetostne napetosti, ki deluje na armaturo in se spreminja s spreminjanjem serije reostat . Medtem ko se sprememba vzbujevalnega toka zgodi s spremembo ranžirnega reostata. Ta tehnika nadzora hitrosti v enosmernem motorju ni tako draga zaradi velikih izgub moči pri uporih regulacije hitrosti. Hitrost je mogoče do neke mere regulirati, vendar ne nad normalno ravnjo hitrosti.

Metoda krmiljenja hitrosti enosmernega motorja armature
Napetost priključka armature
Hitrost motorja z enosmernim tokom je mogoče doseči tudi z napajanjem motorja z uporabo posamezne spremenljive napajalne napetosti, vendar je ta pristop drag in se ne izvaja široko.
Terensko nadzorovana tehnika je nadalje razvrščena v dve vrsti:
- Preusmerjevalnik polja
- Nadzor izbranega polja (nadzor izbranega polja)
Tehnika poljskega preusmeritelja
Ta tehnika uporablja preusmerjevalnik. Hitrost toka, ki je čez polje, lahko zmanjšamo z ranžiranjem dela motornega toka čez serijsko polje. Manjši je upor preusmerjevalnika, poljski tok je manjši. Ta tehnika se uporablja za več kot običajno območje hitrosti in se uporablja pri električnih pogonih, kjer se hitrost poveča, ko pride do zmanjšanja obremenitve.

Nadzor hitrosti enosmernega motorja poljskega preusmeritelja
Nadzor nad izkoriščenim poljem
Tu se bo tudi z zmanjšanjem pretoka povečala hitrost in to dosežemo z zmanjšanjem obratov navitja polja, od koder poteka tok toka. Tu se odvzame število točenja v navitju polja in ta tehnika se uporablja pri električnih vlekah.
Nadzor hitrosti enosmernega motorja
Razdelimo ga lahko na dve vrsti, in sicer:
- Terensko nadzorovana tehnika
- Tehnika nadzora armature
Metoda terenskega krmiljenja za enosmerni motor
Pri tej metodi se magnetni tok zaradi navitij polja spreminja, da se spreminja hitrost motorja.
Ker je magnetni tok odvisen od toka, ki teče skozi navitje polja, ga lahko spreminjamo s spreminjanjem toka skozi navitje polja. To lahko dosežemo z uporabo spremenljivega upora v zaporedju z uporovnim uporom.
Ko je spremenljivi upor prvotno v najnižjem položaju, nazivni tok teče skozi navitje polja zaradi nazivne napajalne napetosti, zato je hitrost normalna. Ko se upor postopoma povečuje, se tok skozi navitje polja zmanjša. To pa zmanjša nastali tok. Tako se hitrost motorja poveča nad normalno vrednost.
Način nadzora odpornosti armature za enosmerni motor
S to metodo lahko hitrost enosmernega motorja nadzorujemo z nadzorom upora armature za nadzor padca napetosti na armaturi. Ta metoda uporablja tudi spremenljivi upor zaporedno z armaturo.
Ko spremenljivi upor doseže najnižjo vrednost, je upor armature v normalnem položaju, zato napetost armature pade. Ko se vrednost upora postopoma povečuje, se napetost na armaturi zmanjša. To pa vodi do zmanjšanja hitrosti motorja.
Ta metoda doseže hitrost motorja pod normalno mejo.
Metoda krmiljenja napetosti armature za enosmerni motor (metoda Ward Leonard)
Tehnika Ward Leonard iz Krmilno vezje enosmernega motorja je prikazan na naslednji način:
Na zgornji sliki je M glavni motor, pri katerem je treba regulirati njegovo hitrost, G pa ustreza posamično vzbujenemu enosmernemu generatorju, kjer se ta poganja s trifaznim motorjem in je lahko sinhronega ali asinhronskega motorja. Ta vzorec kombinacije enosmernega generatorja in motorja s pogonom na izmenični tok se imenuje M-G set.
Napetost generatorja se spreminja s spreminjanjem poljskega toka generatorja. Ta raven napetosti, ko je zagotovljena na odsek armature enosmernega motorja in nato M, se spreminja. Da ostane tok motornega polja konstanten, je treba tok motornega polja vzdrževati kot konstanten. Ko je regulirana hitrost motorja, mora biti tok armature za motor enak kot nazivni nivo.
Dobavljeni poljski tok bo drugačen, tako da se raven napetosti armature spreminja od '0' do nazivne ravni. Ker uravnavanje hitrosti ustreza nazivnemu toku in vztrajnemu pretoku motorja in pretoku polja, dokler ni dosežena nazivna hitrost. In ker je moč plod hitrosti in navora in je v neposrednem sorazmerju s hitrostjo. S tem se pri povečanju moči hitrost poveča.
Obe zgoraj navedeni metodi ne moreta zagotoviti nadzora hitrosti v želenem območju. Poleg tega metoda krmiljenja pretoka lahko vpliva na komutacijo, medtem ko metoda krmiljenja armature vključuje velike izgube moči zaradi uporabe upora, ki je zaporeden z armaturo. Zato je pogosto zaželena drugačna metoda - tista, ki nadzoruje napajalno napetost za nadzor hitrosti motorja.
Posledično se s tehniko Ward Leonard nastavljivi pogonski pogon in konstantna vrednost navora dosežeta od minimalne stopnje hitrosti do ravni osnovne hitrosti. Tehnika regulacije pretoka polja se uporablja predvsem, kadar je raven hitrosti večja od osnovne hitrosti.
Tu se v funkciji tok armature vzdržuje na konstantni ravni pri določeni vrednosti, napetost generatorja pa se ohranja na konstantni ravni. Pri takšni metodi poljsko navitje prejme fiksno napetost, armatura pa spremenljivo napetost.
Ena takšna metoda nadzora napetosti vključuje uporabo stikalnega mehanizma za zagotavljanje spremenljive napetosti na armaturi, druga pa z izmeničnim generatorjem, ki napaja armaturo (AC) Ward-Leonardov sistem ).
The prednosti in slabosti oddelka Leonard metho d so:
Prednosti uporabe tehnike Ward Leonard za nadzor hitrosti enosmernega motorja so naslednje:
- V obe smeri lahko v daljšem območju gladko nadzorujete hitrost naprave
- Ta tehnika ima lastno zavorno sposobnost
- Slednji reaktivni volt-amperi so uravnoteženi s pogonom in močno vzbujeni sinhroni motor deluje kot pogon, tako da bo prišlo do povečanja faktorja moči
- Ko utripa utripa, je pogonski motor vklopljen asinhronski motor z vztrajnikom, ki se uporablja za zmanjšanje utripajoče obremenitve na minimalno raven
Slabosti tehnike Ward Leonard so:
- Ker ima ta tehnika nabor motorjev in generatorjev, so stroški večji
- Naprava je zapleteno oblikovana in ima tudi težko težo
- Potrebujete več prostora za namestitev
- Zahteva redno vzdrževanje in temelj ni stroškovno učinkovit
- Prišlo bo do velikih izgub in tako se bo učinkovitost sistema zmanjšala
- Ustvari se več hrupa
In uporaba metode Ward Leonard je nemoten nadzor hitrosti v enosmernem motorju. Nekaj primerov so rudarska dvigala, papirnice, dvigala, valjarne in žerjavi.
Poleg teh dveh tehnik je najpogosteje uporabljena tehnika nadzor hitrosti enosmernega motorja s PWM za nadzor hitrosti enosmernega motorja. PWM vključuje uporabo impulzov različnih širin na gonilnik motorja za nadzor napetosti, ki deluje na motor. Ta metoda se izkaže za zelo učinkovito, saj je izguba energije minimalna in ne vključuje uporabe nobene kompleksne opreme.

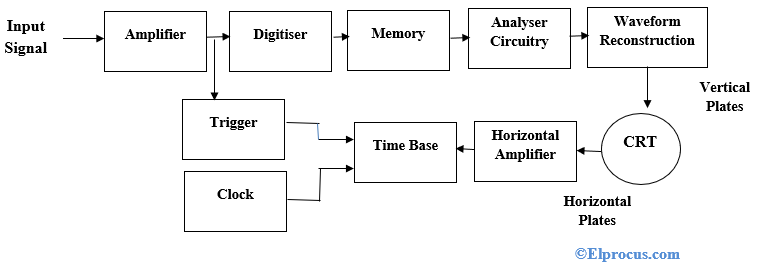
Način nadzora napetosti
Zgornji blokovni diagram predstavlja preprosto regulator hitrosti elektromotorja . Kot je prikazano v zgornjem blokovnem diagramu, se mikrokrmilnik uporablja za napajanje PWM signalov gonilniku motorja. Gonilnik motorja je L293D IC, ki je sestavljen iz H-mostnih vezij za pogon motorja.
PWM se doseže s spreminjanjem impulzov, ki se nanašajo na omogočilni zatič gonilnika motorja IC, da nadzira uporabljeno napetost motorja. Spreminjanje impulzov izvaja mikrokrmilnik z vhodnim signalom s tipk. Tu sta na voljo dve tipki, vsaka za zmanjšanje in povečanje obratovalnega cikla impulzov.
Torej, ta članek je podrobno razložil različne tehnike nadzora hitrosti enosmernega motorja in kako je nadzor hitrosti najpomembnejši. Poleg tega je priporočljivo vedeti o 12v enosmerni regulator hitrosti motorja .