V prispevku je razložena preprosta ovira za izogibanje robotskemu vezju brez mikrokrmilnika in brez uporabe posebnih vezja motornih vozil ali IC. Idejo je zahteval gospod Faiyyaz
Dizajn
V bistvu je v obliki premikajoče se vozilo ki je sposoben zaznati in se izogniti morebitnim oviram na svoji poti ter ustrezno spremeniti svojo smer, tako da njegovo gibanje ostane nemoteno, preprosto!
Postopek je tako samodejen brez kakršnega koli ročnega ali človeškega posredovanja.
Predstavljena ideja o robotu, ki se izogiba oviram, kot že ime pove, ne uporablja mikrokrmilnika, zato je izjemno enostavna za izdelavo in primerna za vsakega novega ljubitelja.
Med načrtovanjem vezja sem spoznal, da bo za uresničitev načela potrebnih vsaj nekaj modulov senzorjev ovir, ker lahko uporaba enega samega modula povzroči neredno gibanje motorja in morda ne bo pripomogla k gladkem preusmerjanju ali obračanju vozila proti prosta pot.
Vgrajeni motor vozila je precej podoben modelu avtomobil na daljavo o katerem sem razpravljal v enem od prejšnjih prispevkov.
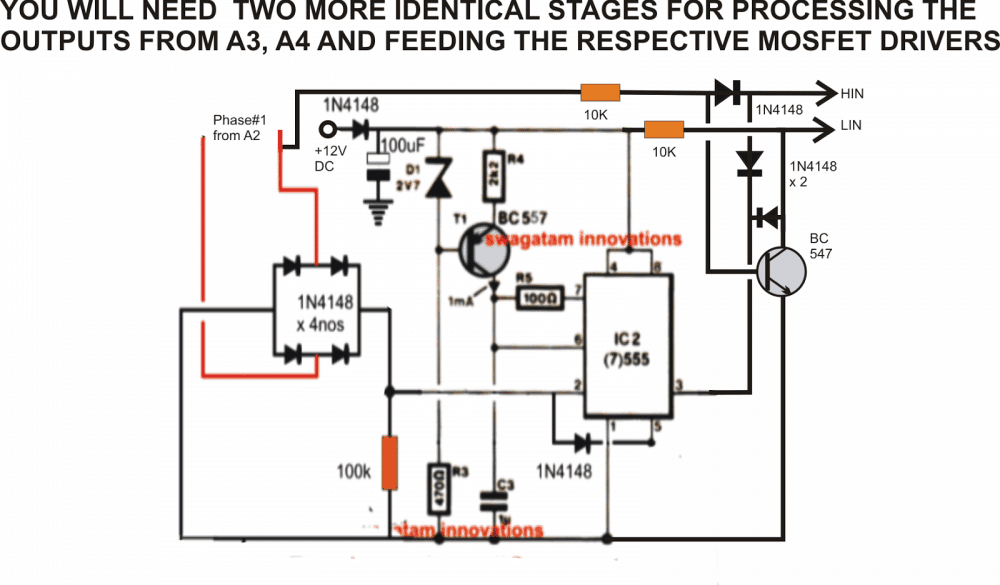
Naslednji diagram predstavlja enega od modulov sistema, zato bi bila na desni in levi strani vozila potrebna dva ali par takih modulov.
Ideja je preprosta in deluje brez mikrokrmilnika in brez posebnih IC-jev gonilnikov motorja. To pomeni, da ga lahko naredite brez kakršnega koli kodiranja in brez uporabe kakršnega koli zapletenega gonilnika motorja IC ..... in vezje vam omogoča uporabo katerega koli enosmernega motorja ne glede na njegovo moč, tako da bi lahko vozila, ki se izogibajo oviram z veliko močjo, izdelani po tem vezju, ki se običajno uporabljajo v nakupovalnih središčih in podobnih prodajnih mestih.
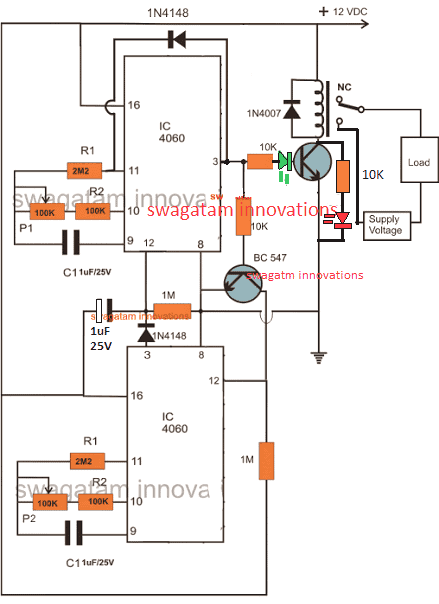
Shema vezja

Zdaj poskusimo razumeti zgornje vezje s pomočjo naslednje razlage:
Kako deluje
IC 555 je konfiguriran kot IR oddajnik in je nastavljen tako, da generira konstantno frekvenco 38 kHz, medtem ko je sosednje tranzistorizirano vezje konfigurirano kot stopnja sprejemnika ali stopnja IR senzorja.
Predpostavimo, da gre za desni bočni modul, in domnevamo, da je ta modul prvi, ki zazna oviro na poti.
Takoj ko se zazna ovira, se frekvenca 38kHz, ki jo ustvari 555 IC, odbije proti senzorju sosednjega sprejemniškega vezja.
Sprejemnik takoj aktivira pripadajoče tranzistorje tako, da končnemu gonilnemu tranzistorju onemogoči prevod.
Zdaj naj bi bil motor, ki ga krmili ta tranzistor, nameščen na levi strani vozila, to je na nasprotni strani tega modula ... podobno motor na desni strani dejansko krmili levi bočni modul .
Ko se zgornji domnevni modul detektorja ovir aktivira, zaustavi motor na levi strani, medtem ko se desni motor lahko normalno premika.
V tej situaciji je vozilo prisiljeno v levo bočno preusmeritev ... kar pomeni, da zdaj prevzeti levi modul začne dobivati še močnejše signale ovir in vozilo sili, da nadaljuje z močnejšim preusmerjanjem, dokler se oviri popolnoma ne izogne . Zdaj modul preneha sprejemati signale ovir in vozilo se začne normalno premikati naprej po svoji novi poti.
Medtem ko se izvede zgornja preusmeritev, je levi bočni modul prisiljen postajati vedno bolj izoliran in oddaljen od ovire, tako da ne dobi priložnosti za vmešavanje v postopek, ter omogoča čist in gladek preusmeritev vozila.
Popolnoma enaki postopki se izvajajo v primeru, da levi bočni modul zazna oviro pred desnim bočnim modulom, pri čemer je vozilo prisiljeno čedalje težje premikati proti desni strani.
V modulu lahko vidimo tudi stopnjo 'onemogočanja' vezja, ki sta med seboj povezani preko leve in desne bočne module. Ta stopnja je namenoma uvedena, da se zagotovita, da se oba modula nikoli ne aktivirata skupaj.
Če na primer levi bočni modul prvi zazna oviro, takoj onemogoči desni modul in sproži preusmeritev vozila na desni in obratno.
IC senzorja je lahko standardna serija TSOP17XX
Za več informacij o zgornjem IC senzorju se lahko naučite kako povezati TSOP1738 IC
In motor mora biti opremljen z menjalniki, tako da se gibanje prvotno vzdržuje na nadzorovani ravni.
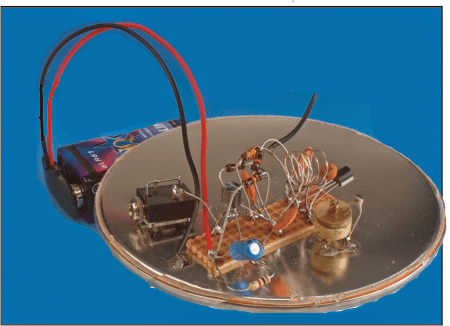
Nastavitev kolesa
Popolna postavitev levega in desnega modula ter pripadajočih električnih priključkov je razvidna iz spodnje slike:

Nadgradnja
Malo razmišljanja nam pove, da bi lahko zgoraj navedeno preprosto robotsko vezje, ki se izogiba oviram, izvedli tudi z uporabo enega samega modula, namesto obeh.
Vendar en modul omogoča, da vozilo izvede enostransko preusmeritev vsakič, ko zazna oviro, zato je sistem mogoče konfigurirati bodisi za preusmeritev v smeri urinega kazalca ali v nasprotni smeri urnega kazalca, odvisno od tega, kateri motor je povezan z vezjem.
Primer nastavitve je mogoče prikazati na naslednji sliki:

Vendar se zdi, da je z zgoraj postavljenim enojnim motorjem ena težava. Če domnevamo, da vozilo na levi strani naleti na pravokotni kot. To bo vozilo prisililo, da se bo še naprej premikalo v nasprotni smeri urnega kazalca, dokler ne zavije zavoja in se bo začelo premikati nazaj v isto smer od mesta, kjer se je začelo. Uporabnik tega ne bi cenil.
Prejšnji: SMD upori - uvod in delovanje Naprej: Kako deluje merilnik pospeška