Roboti se lahko uporabljajo v številnih aplikacijah v industriji, vojski, doma. Ena največjih uporab robotov je prednost ljudem. Ne glede na to, ali gre za kakršne koli nevarne situacije, kot je požar ali kraj, poln min, roboti zlahka najdejo rešitev za te težave. Poglejmo si torej ti dve vrsti robotov - Robot, ki zaznava kopenske mine, in Robot za gašenje požarov
Robot za zaznavanje kopenskih min
Kako zaznati kopensko mino z roboti?
Ena najpomembnejših aplikacij robotike je v obrambi. Vojaški robot je daljinsko vodeno vozilo s številnimi edinstvenimi lastnostmi. To je lahko robotsko vozilo s kamero za vohunjenje, robotsko vozilo s pištolo LASER za odkrivanje in uničenje ciljev ali robot z detektor kovin za odkrivanje prisotnosti min.
Eden od tradicionalnih in običajnih načinov odkrivanja min je uporaba usposobljenih oseb, ki ročno iščejo kovine ali mine z detektorjem kovin. Vendar je to nevarno, drago in tudi počasno.
Da bi rešili to težavo, je zaželen precej naprednejši sistem.
Nekaj načinov za odkrivanje min:
- Uporaba robota, ki lahko v tla vstavi sondo, ki lahko zazna predmete pod zemljo in določi vrsto materiala.
- Uporaba robota z detektorjem kovin, ki lahko zazna prisotnost prevodnih elementov, kot so mine in alarmira uporabnika.
Preden se poglobimo v podrobnosti o drugi vrsti - to je robotu z detektorjem kovin, se na kratko spomnimo dveh pomembnih izrazov - kopenske mine in detektor kovin.
TO Kopniška je eksplozivna naprava, namenoma nameščena pod zemljo, ki eksplodira ob pritisku. Po statističnem poročilu je v 70 državah sveta približno 100 milijonov min. Enkrat postavljena mina lahko deluje do 50 let. Ali ni nevarno !!

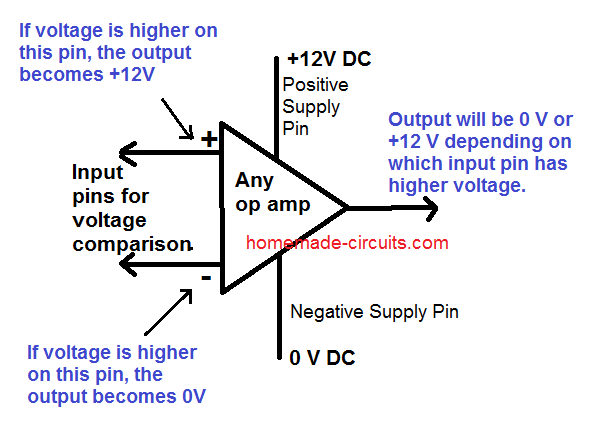
Osnovni detektor kovin deluje po principu faradayevega zakona indukcije. Sestavljen je iz tuljave, ki je pod napetostjo, da razvije pulzirajoče magnetno polje okoli sebe. Ko tuljava pride v bližino prevodnega elementa, kot je kovina (rudnik), v njej nastane električni tok (vrtinčni tok). Inducirani vrtinčni tok povzroči razvoj elektromagnetnega polja okoli kovine, ki se ponovno odda v tuljavo, ki razvije analiziran električni signal. Večja je razdalja med tuljavo in kovino, šibkejše je magnetno polje.
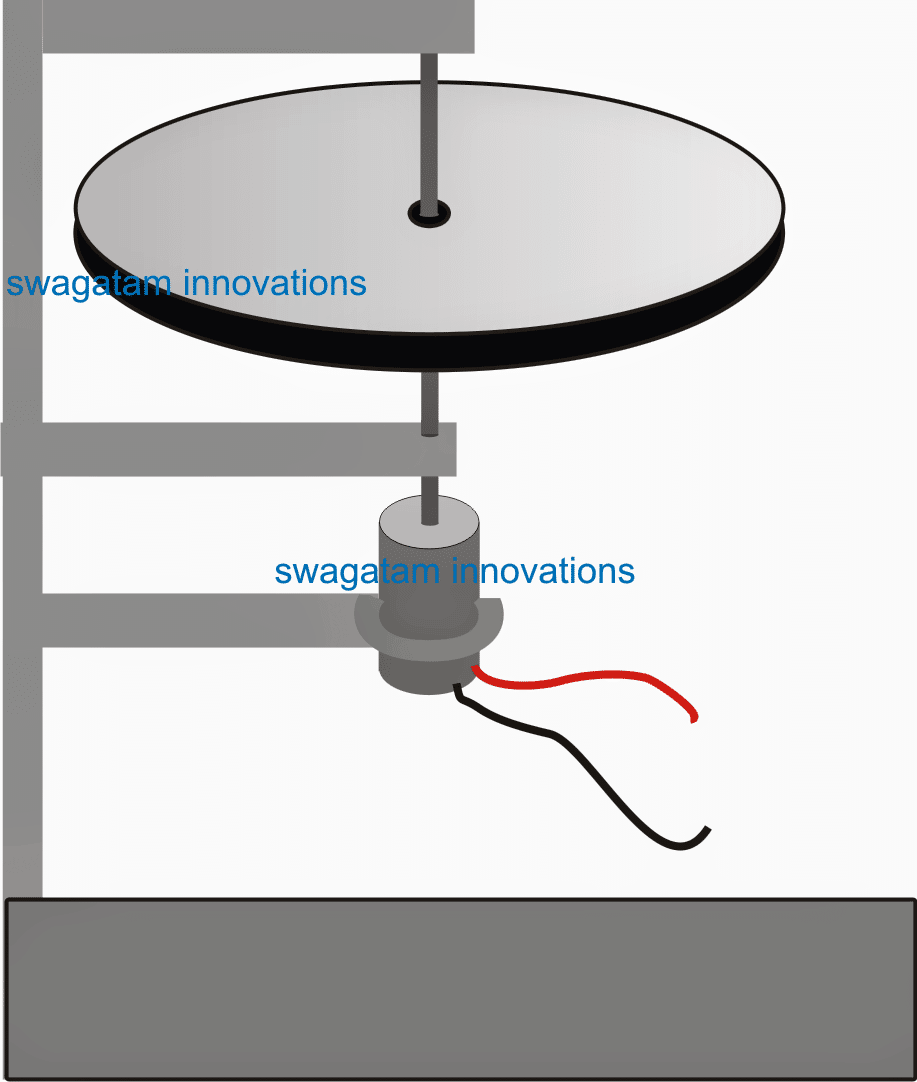
Preprost prototip:

Preprost prototip robotskega vozila z detektorjem kovin
Oblikovanje robota:
Robotsko vozilo je sestavljeno iz naslednjih enot:
- Pravokotna podlaga za podporo celotni strukturi robota, pritrjena z dvema kolesoma za gibanje.
- Nekaj enosmernih motorjev za zagotavljanje potrebnega gibanja robota.
- Krmilna enota, sestavljena iz RF sprejemnika, ki sprejema ukazne signale od oddajne enote za nadzor gonilnika motorja in ustrezno krmiljenje motorjev.
- Ko zazna kovino, se sproži vezje kovinskega detektorja skupaj z brenčalom.
Kako deluje robot:
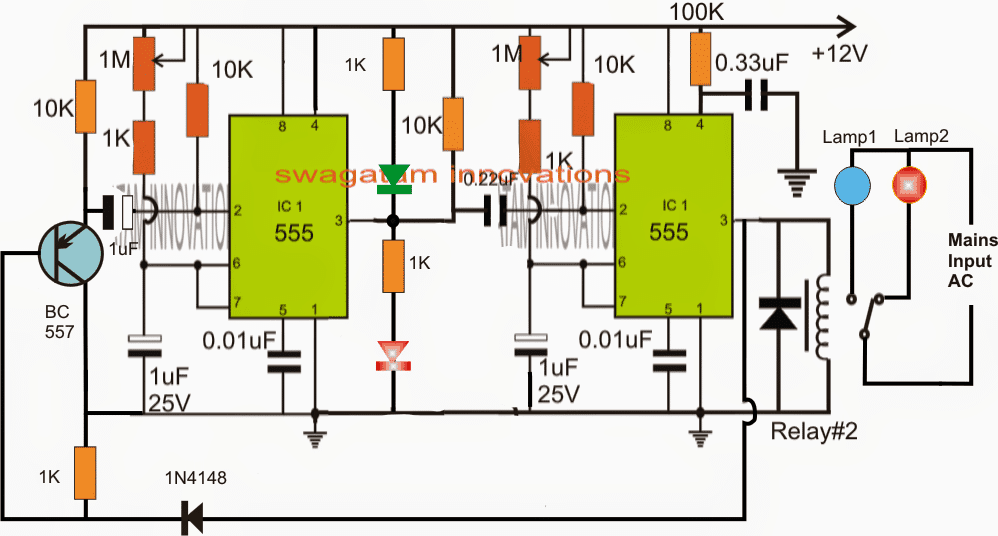
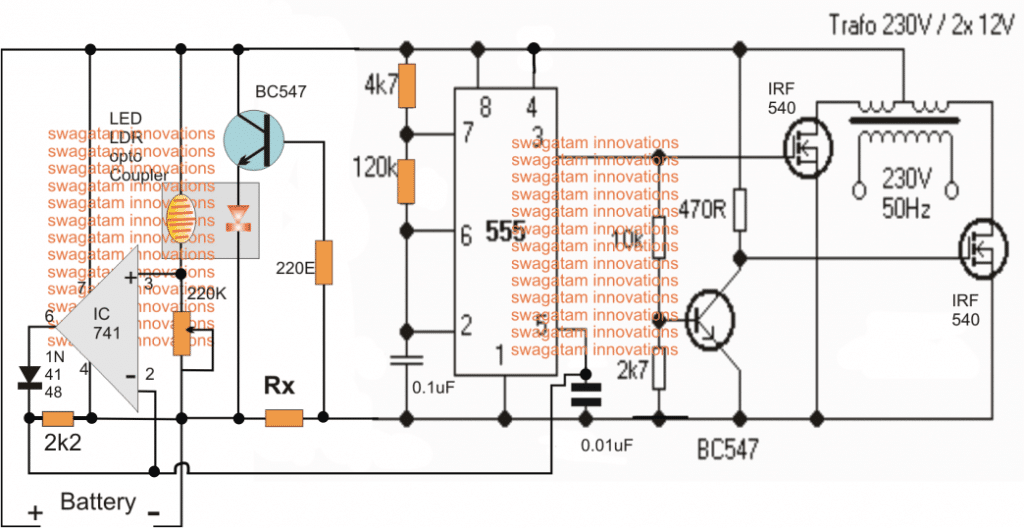
Vezje kovinskega detektorja, vdelano v krmilno vezje robota, je sestavljeno iz tranzistorja, ki ga poganja uglašeno oscilatorno vezje, sestavljeno iz tuljave. Ko se zazna kovina in se električni tok ponovno odda skozi tuljavo, je tranzistor1 v stanju in poganja še en tranzistor2 v izklopljeno stanje. Ta tranzistor3 pa poganja še en tranzistor v izklopljeno stanje. Ta tranzistor 3 je povezan z drugim tranzistorjem 4, ki je povezan tako, da je v stanju, ko je njegov gonilni tranzistor 3 v izklopljenem stanju. Tranzistor 4 je povezan tako, da dobita zvočni signal in LED, če je v stanju, pravilno nastavljena in začneta voditi.

Blokovni diagram enote detektorja kovin
LED začne žareti in zvočni signal začne zvoniti. Ko bo kovina zaznana, bo sprožil zvočni signal in LED bo zasvetila.
Nadzor robota:
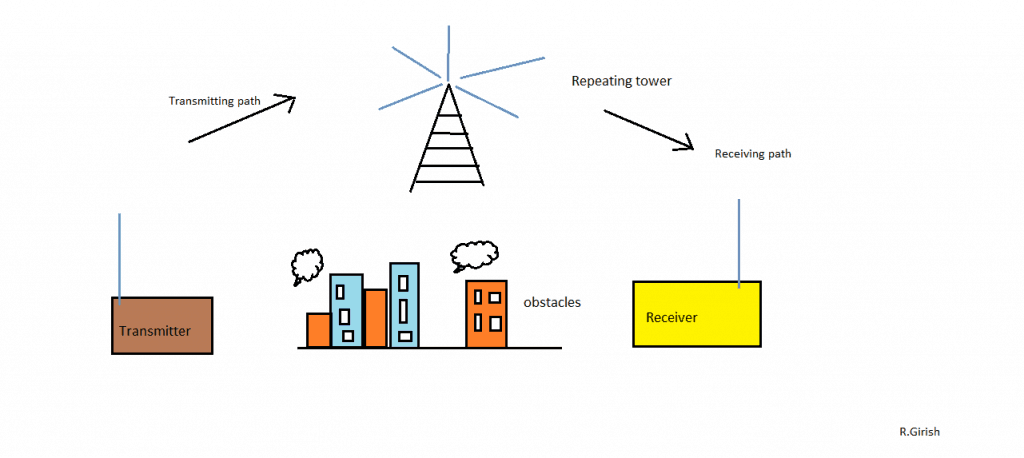
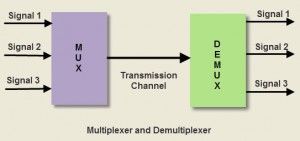
Preprost prototip je mogoče nadzorovati z RF komunikacijo, ki je komunikacijski sistem kratkega dosega. Ukazi se prenašajo z uporabo oddajnika in jih sprejme sprejemnik, ki je vgrajen v robotsko vezje za nadzor gibanja robota.

Blok diagram odseka oddajnika
Oddajnik je sestavljen iz nabora tipk, kot so naprej, nazaj, zaustavitev, levo in desno, ki so pritisnjene, da omogočijo gibanje robota v kateri koli želeni smeri. Tipke so povezane z vhodnimi vrati mikrokrmilnika. Mikrokrmilnik ob sprejemu teh signalov razvije ustrezen 4-bitni signal v vzporedni obliki prek drugih V / I vrat, na katera je priključen IC dajalnika. Dajalnik pretvori te signale v serijsko obliko podatkov. RF oddajnik modulira te serijske podatke, ki se prenašajo prek antene.

Blokovni diagram sprejemnika
Odsek sprejemnika, nameščen na robotu, je sestavljen iz RF sprejemnika, ki demodulira ta signal. IC dekodirnika sprejme ta signal v serijski obliki in na svojem izhodu razvije ustrezne 4-bitne vzporedne podatke. Mikrokrmilnik prejme te podatke in v skladu s tem poda krmilni signal gonilniku motorja IC LM293D, ki poganja oba motorja.
Robotsko vozilo za gašenje požarov:
Koncept robotsko vozilo za gašenje požarov se bori v ognju. V zadnjih letih se je zgodilo več hudih nesreč, vključno z ognjem in eksplozijami bomb. Vedeli smo o večjih požarnih nesrečah, kot so jedrske elektrarne, naftni rezervoarji, cisterne za plin in kemične tovarne, velika gasilska podjetja v teh krajih, ki so enkrat zanetila ogenj, so lahko zelo resna. V tej incidenti je umrlo na tisoče ljudi. To je gašenje požara robotsko vozilo tehnologija. To robotsko vozilo je nekoč našlo ogenj in se borilo za požare.

Robotsko vozilo za gašenje požarov
Načelo delovanja gasilnega robotskega vozila:
Robotsko vozilo, natovorjeno s cisterno za vodo. Črpalko nadzoruje brezžična komunikacija (RF in mobilna komunikacija). Konec oddajnika, povezan s tipkami. S to tipko se ukazi pošljejo sprejemniku in nadzorni moment robota, kot naprej, nazaj, levo, desno. Tri sprejemni končni motorji so povezani z mikrokrmilnikom.

Blokovni diagram oddajnika

Blokovni diagram sprejemnika
RF oddajnik deluje kot RF daljinski upravljalnik pri dosegu 200 metrov. V domu, pisarnah in industriji so požarni senzorji na določenih mestih, ko pride do požara v bližini požarnega senzorja. Senzorji so občutek, da se ustrezni bit prenese na RF sprejemnik. RF sprejemnik je integriran z mikrokrmilnikom. Ko RF sprejemnik sprejme signale, da informacije prehajajo na mikrokrmilnik, se robot premakne proti požarnim senzorjem. Lokacije senzorjev so shranjene v mikrokrmilniku. Ko robot doseže želeno lokacijo, se robot ustavi in aktivira pršilko na ta ogenj. Po strelu robot preide v začetni položaj. Celotno vezje nadzoruje mikrokrmilnik.
Vrste gasilskih robotiziranih vozil:
Domače gasilsko robotsko vozilo :
Akcija na terenu je omejena na trenutno Flore of house. Ta robot uporablja veliko gospodinjskih predmetov, da se zažge, ko nekdo spi ali ni tu. Ta robot se uporablja za zaščito doma in s to aplikacijo se v Floreju odprejo vsa vrata, ker se to vozilo premika eno mesto na drugo mesto v domu. Protipožarno območje mora biti varno, da ne povzroči nove nesreče. Dodatna značilnost tega robota je delovanje na velike razdalje.
Industrijsko gašenje požarov:
Večina industrij se sooča s težavami s požarnimi nesrečami, kot so plin, bencin, jedrske elektrarne, kemična industrija, ogromna škoda in več ljudi je mrtvih v bližini okoliških območij. Ta robot ima moč prenašati ogenj znotraj gorečega območja in dovajati neomejeno količino vode. Požar povzroča zmanjšano vidljivost, izredno vročino in še veliko več situacij, ki lahko povzročijo poškodbe.
Gašenje gozdnih požarov:
Gozdni požari so zelo nevarni. Kratek čas lahko zažge veliko količino gozdne površine. Tudi mestne gasilske enote se morajo spopadati z gozdnimi požari v okolici mesta. Nekaj let nazaj je bilo v devetdesetih letih umrlo približno 152 gasilcev. Robotika gozdnih požarov uporablja za zapiranje ognja in gašenje v ognju. Ta robot uporablja zunanjo krmilno napravo za namene brezžične komunikacije. Modul je povezan z izhodnim koncem, ki se uporablja za gašenje gozdnih požarov robota. Aplikacije, kot so tlačni senzor, temperaturni senzor, smog, infrardeči senzor, se uporabljajo za nadzor robota za gašenje gozdnih požarov.
Na poziv!
Čeprav sem dal osnovno idejo o robotu z detektorjem kovin, še vedno obstaja glavno vprašanje - kako voditi robota na neravnih terenih, ki so neznani, zlasti v okoljih, ki so izpostavljena močnemu deževju, prahu in vročim temperaturnim območjem. Če želite najti odgovor in objaviti svoje komentarje.