
Običajno roboti na daljinsko upravljanje uporabljajo RF vezja, ki imajo pomanjkljivosti omejenega delovnega območja, omejenega nadzora in omejenega frekvenčnega območja. Da bi odpravili te pomanjkljivosti, Land Rover, ki ga upravlja mobilni telefon uporablja se robotsko vozilo. Zagotavlja prednosti robotskega nadzora, krmilnikov brez vdora in do dvanajst nadzornih sistemov itd.
Čeprav zmogljivosti in videz vgrajena robotika zelo razlikujejo, imajo vsi roboti značilnosti premične mehanske konstrukcije pod neko obliko nadzora. Nadzor robotov vključuje tri različne faze, ki so zaznavanje, obdelava in delovanje. Običajno so senzorji nameščeni na robotu. Zaznavanje in obdelavo izvaja mikrokrmilnik na vozilu, dejanje pa se izvaja z motorji.
Robotsko vozilo Land Rover, ki ga upravlja mobilni telefon

Robotsko vozilo Land Rover, ki ga upravlja mobilni telefon, Edgefxkits.com
Glavni namen tega projekta je z uporabo mobilnega telefona nadzirati robotsko roko, ki je nameščena na robotskem vozilu. Zagotavlja veliko delovno območje in močan nadzor itd.
Blokovni diagram robotskega vozila Land Rover, ki ga upravlja mobilni telefon:

Blok diagram Land Roverja, ki ga upravlja mobilni telefon
Glavni gradniki so mikrokrmilnik, mobilni telefon, DTMF dekoder in vezje enosmernega motorja. Mobilni telefon je najpomembnejši del celotnega sistema, ker celoten sistem deluje in ga aktivira mobilni telefon. DTMF (dvotonski večfrekvenčni) sprejema vhodni signal iz mobilnega telefona in ga dekodira, nato pa generira 4-bitni digitalni izhod na 8051 mikrokrmilnik . Ko da dekoder DTMF digitalni izhod, vsakič ustvari tudi prekinitev.
Mikrokrmilnik je srce celotnega sistema, saj izvaja celotna nadzorna dejanja. Mikrokrmilnik je odvisen od kode, ki jo generira dekoder DTMF, da z vrtenjem obeh enosmernih motorjev premika rover desno ali levo in naprej ali nazaj. Gonilnik enosmernega motorja sprejema aktivirne signale od mikrokrmilnika v smislu nizke ali visoke logike, nato pa ojača in zavrti dva motorja v obe smeri.
Nadzor robota vključuje predvsem štiri različne faze: zaznavanje, obdelava dejanj in zaznavanje. V fazi zaznavanja, če mobilni telefon, priključen na robota, prejme klic, pritisk tipke na mobilnem telefonu dekodira ustvarjeni ton DTMF. Nato čip dekodirnika sprejme zvočni signal iz mobilnega telefona in nato pretvori ton DTMF v binarno kodo, ki se nato pošlje v mikrokrmilnik. V tem projektu se kot dekodirnik DTMF uporablja IC MT88710. V fazi obdelave mikrokrmilnik obdela binarno kodo, ki jo prejme dekoder DTMF. The Mikrokrmilnik je vnaprej programiran v 'C' za izvedbo te posebne naloge glede na vhodne bite.
V fazi delovanja je vrtenje motorjev odvisno od vhoda, ki ga daje mikrokrmilnik. Za landrover se uporabljata dva enosmerna motorja s 30 vrtljaji na minuto, ki jih poganja IC-voznik motorja. Na stopnji zaznavanja in za odkrivanje ovir se prikaže infrardeči oddajnik in sprejemnik se uporabljajo skupaj z brenčalom. Ko ovira pride pred robota, IR oddajnik odda IR-žarke na predmet, nato pa objekt odbije IR-žarke v IR sprejemnik. Nato IR sprejemnik sprejme IR žarke, da aktivira brenčalo.
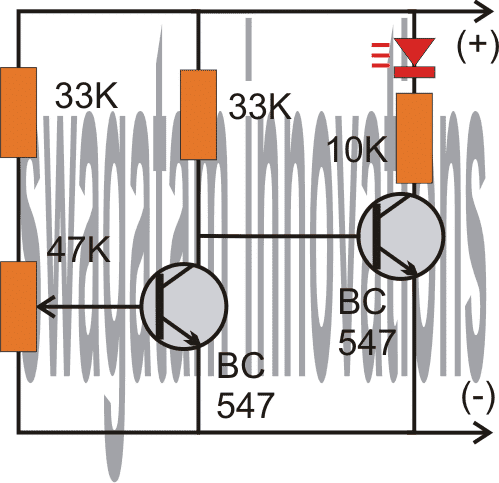
Shema vezja robotskega vozila land rover, ki ga upravlja mobilni telefon:
Glavne komponente tega robotskega landroverja, ki ga upravlja mobilni telefon, so mikrokrmilnik, gonilnik motorja in DTMF dekoder. V tem projektu je uporabljen dekodirnik DTMF serije MT8870, ki s pomočjo tehnik digitalnega štetja zazna 16 parov tonov DTMF v 4-bitni izhod kode. Vgrajeno dialtone vezje odpravlja predfiltracijo. Če je na zatiču 2 podan vhodni signal, se prepozna vhodna konfiguracija kot učinkovita. 4-bitni signal za dekodiranje tona DTMF se prenese na pin11 skozi izhod pin 14. Ti zatiči so povezani z zatiči mikrokrmilnika Pao, Pa1, Pa2 in Pa3. Izhod mikrokrmilnika iz priključnih zatičev PD0 do PD3 in PD7 se napaja na vhode IN1, IN4 in omogoča zatičem EN1, EN2 gonilnika motorja L293D IC pogon dveh enosmernih motorjev .

Shema vezja Land Roverja, ki ga upravlja mobilni telefon
V tem vezju se za ročno ponastavitev uporablja stikalo S1. Izhod mikrokrmilnika ni dovolj za pogon enosmernih motorjev, zato so za vrtenje motorja potrebni trenutni gonilniki. Gonilnik motorja L293D je zasnovan tako, da zagotavlja dvosmerne pogonske tokove do 600 mA pri napetostih od 4,5 V do 36 V, zaradi česar je lažje voziti enosmerne motorje. Motorni voznik L293D je sestavljen iz štirih voznikov. Zatiči IN1 do IN4 & OUT1 in OUT4 so vhodni in izhodni zatiči gonilnika 1 do gonilnika 4. Gonilnike 1,2,3 in 4 omogočata vtič za omogočanje1 (EN1) in zatič 9 (EN2). Ko je vhod za omogočanje EN1 (pin1) visok, sta gonilnika 1 in 2 omogočena. Podobno vhod za omogočanje EN2 (pin9) omogoča gonilnike 3.
Prednosti in slabosti:
Prednosti robotskega landroverja, ki ga upravlja mobilni telefon, vključujejo sistem za zagotavljanje in nadzor brezžičnega krmiljenja, navigacijo v vozilih s tehnologijo 3G in neomejen obseg delovanja na podlagi omrežja mobilnega telefona. Pomanjkljivost vključuje: stroški zaračunavanja mobilnih telefonov so visoki mobilne baterije se izpraznijo : problem praznjenja, povezan z baterijami, saj se baterije zaradi hitrega praznjenja napolnijo, ker je obremenitev velika prilagodljivost: sistem ni prilagodljiv vsem mobilnim telefonom, lahko pa se uporabljajo samo tisti s priklopljenimi slušalkami.
Tako je ta projekt robotov, ki jih upravlja mobilni telefon, zelo koristen v vojaških aplikacijah za nadzor vojaških vozil z uporabo mobilnega telefona. V prihodnosti lahko zaznamo položaj sovražnikov z ureditvijo a brezžična kamera na robotsko vozilo land rover. Ta projekt je lahko koristen tudi akademikom, saj se študentje lahko naučijo različnih terminologij in načel, predlaganih v tem projektu. Ta projekt bo študentom pomagal dodati svoje inovativne misli in ideje razvijati robotske projekte .
Zasluge za fotografije:
- Land Rover, ki ga upravlja mobitel santoshbanisetty
- Shema vezja Land Roverja, ki ga upravlja mobitel inženirska garaža





{kind=link}