
Smrt je nekaj, kar je neizogibno. Kaj pa nenadna smrt samo zaradi neke nesreče na cesti ali še najhujše - poškodbe, ki lahko človeku za vedno zapeče življenje. Ali vas ne zadrhti po hrbtenici, že ob razmišljanju o tem? Kaj je glavni razlog za nesreče? Seveda nepremišljena vožnja in hitra vožnja vozil, še posebej po gladki cesti, kot na visoki cesti.
Po statističnih poročilih je bilo med letoma 2005–2009 okoli 1200 smrtnih žrtev zaradi nesreč zaradi hitrih voženj. In še več, skoraj vsak dan lahko slišite novice o nesrečah zaradi vozne vožnje.
Torej, ali obstaja način, da se to prepreči? Seveda!
Obstaja več načinov, na primer biti dober voznik in upoštevati prometna pravila ter vzdrževati normalno hitrost. Vendar obstaja en pomemben način, in sicer spremljanje hitrosti vozila in temu primerno spremljanje.
To je mogoče tehnološko doseči z oblikovanjem načina za preverjanje hitrosti vozila.
2 načina preverjanja hitrosti:
- Namestitev senzorjev hitrosti na cesto ali na sredino ceste .
- Vključuje procesorje za video slike : Sestavljen je iz kamere, nameščene na stebrih obcestnih pasov, ki nenehno spremlja situacijo s hitrim zaporednim snemanjem posnetkov. Parametri prometnega toka se v signalnem procesorju ustrezno analizirajo in obdelajo.

Slika, ki prikazuje spremljanje prometa z video kamero
- Vključuje RADAR na pasove :RADAR lahko uporabite za preverjanje hitrosti vozila s pošiljanjem signala v mikrovalovnem pasu proti vozilu in analizo premika frekvence odsevnega signala. RADAR pomeni Radio Detection and Range. Oddani signal je lahko signal s konstantno frekvenco ali spreminjajočo se frekvenco. Običajno je CW Doppler RADAR nameščen na stebrišču ceste.

Zaznavanje hitrosti z uporabo radarja
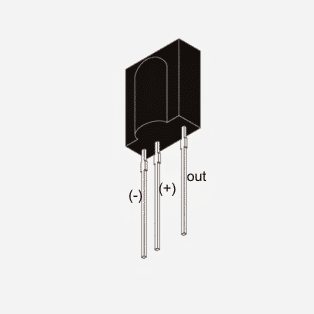
- Namestitev IR senzorjev : IR senzorji s kombinacijo IR LED in fotodiode se lahko uporabljajo za spremljanje prevožene poti vozila in hkrati izračun njegove hitrosti. Osnovna ideja vključuje postavitev para IR LED in fotodiode v pogostih intervalih na obeh straneh cest in spremljanje prekinitve poti med IR LED in fotodiodo v vozilu.
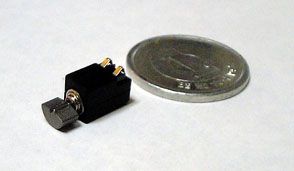
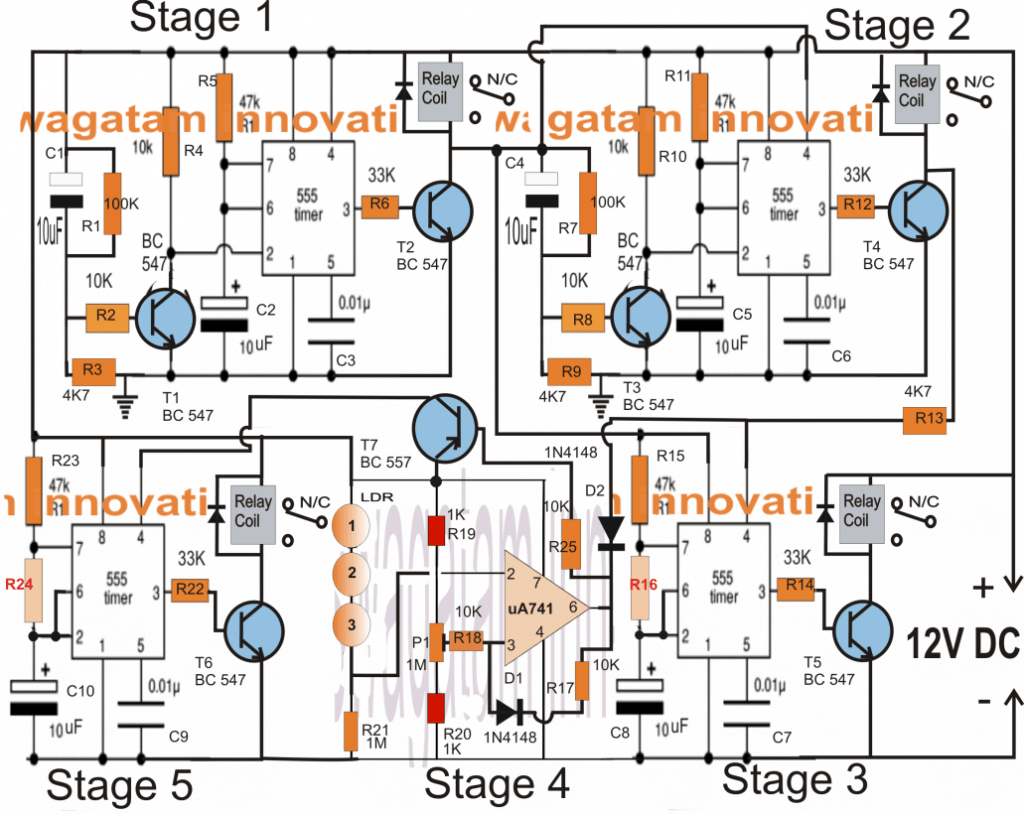
Tu je preprost prototip zgornje metode. Vzorec prototipa deluje z dvema paroma IRLED-fotodiode.

Prototip vezja za preverjanje hitrosti z IR senzorjem Kompleti Edgefx
Sestavljen je iz naslednjih oddelkov:
- Par fotodiode in LED za zaznavanje vozila
- Števec za štetje in prikaz časa, ki ga je vozilo prečkalo pot med obema vodenima fotodiodnima paroma.
- Zvočni signal, ki označuje, ali je hitrost nad nastavljeno mejo.
- IC-ji časovnika za zagotavljanje signalov ob ustreznem času.
- Uporaba pištole LIDAR : LIDAR je sistem za zaznavanje in merjenje na osnovi LASERJA. Prometni policist ima lahko prenosno pištolo LIDAR, ki pošlje kratek izbruh infrardeče svetlobe in ko se ta svetloba odbije nazaj v vozilu, ki se premika, pištola upošteva čas, ki ga odsevni signal porabi, in se za merjenje deli z dvema razdalja. Hitrost se meri tako, da se število vzorcev deli s fiksnim časovnim trajanjem nekaj sekund. Deluje podobno kot sistem RADAR, le da namesto radijskih valov uporablja svetlobne valove.

Pištola LIDAR na rokah prometnega policista
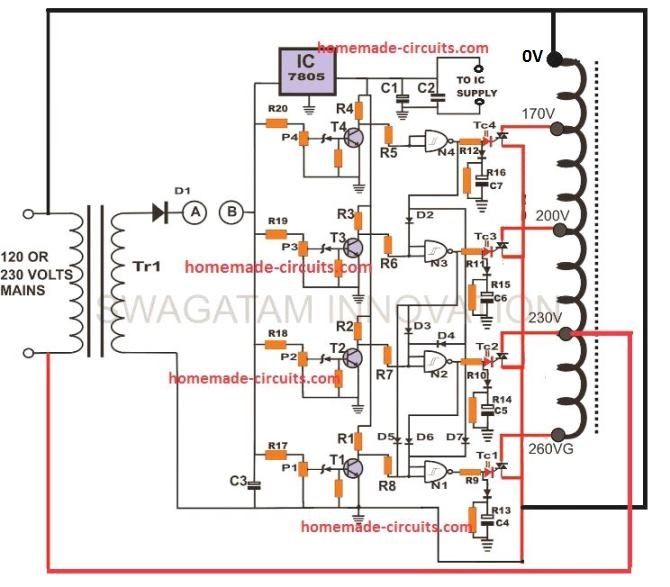
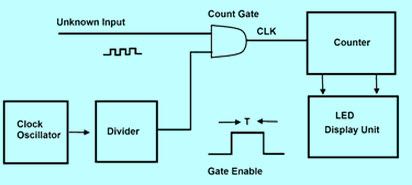
Delovanje sistema za preverjanje hitrosti z uporabo IR senzorjev

Blok diagram, ki prikazuje delovanje sistema za preverjanje hitrosti z uporabo IR senzorjev do Kompleti Edgefx
Ko vozilo prečka pot med prvim parom IRLED-fotodiode, blokira pot svetlobe in fotodiodna odpornost se poveča, kar povzroči ustrezen nizek signal na časovniku IC1. Časovnik IC1 na svojem izhodu proizvaja močan signal za določeno trajanje 10 ms. V normalnih pogojih pri normalni hitrosti na poti med dvema ne bo nobene prekinitvendPar LED fotodiode-IR in ustrezen vhod v časovnik IC2 bo visok, kar bo povzročilo nizek logični signal na njegovem izhodu. Izhoda obeh časovnikov sta priključena na vrata NAND 2m, ki dajejo visok izhod (za nizke in visoke vhode), povezan z vhodom časovnika IC3. Ustrezna izhodna vrednost IC časovnika je nizka, zaradi česar je zvočni signal izključen. Istočasno je izhod iz časovnika IC1 podan na oba vhoda vrat NAND1, kar daje nizek logični izhod, ki je dodeljen timerju IC4, da daje visok logični izhod, povezan z resetirnim zatičem časovnika IC5. Izhod časovnika IC5 je ustrezno visok, kar daje visok impulz števcu IC. Odsek števec je sestavljen iz 4-stopenjskih števcev desetletja za branje večmestnega štetja. Vsaka ura IC števca je povezana z izhodom ure prejšnje IC IC. Števec poveča število na vsakem naraščajočem robu impulza ure.
Zdaj predpostavimo, da se vozilo premika s tako visoko hitrostjo, da doseže pot med drugim parom IRLED-fotodiode v časovnem trajanju, nastavljenem za časovnik IC1. Torej, zdaj bo števec pokazal štetje pod običajnim številom in hkrati, ker bo NAND gate2 na obeh svojih vhodih dobil visoko, bo njegov izhod nizek in temu primerno bo časovnik IC3 prejel nizek vhod za visoko logično izhodno vrednost in v skladu s tem sproži zvočni signal.
Tako razdalja med obema paroma, deljena z odčitkom števca, daje hitrost vozila in če ta hitrost poveča določeno mejo, zvočni signal zazvoni, kar jasno kaže, da je omejitev hitrosti kršena.
Podrobno sem pojasnil enega od načinov. Kakršen koli drug način je dobrodošel kot povratna informacija.
Foto:
- Prometni policist s pištolo LIDAR avtor Wikimedia


{kind=link}